整体理解
STM32HAL库常用函数速查手册——链接
HAL 库的结构理解
首先,你先得知道 STM32 推出 HAL 库的定位是什么,是给大家参考学习用?是闲着没事重新搞一套库?HAL 库本身的定位是 硬件抽象层, 硬件抽象层最核心的任务就是让你不懂硬件,也能操作芯片,让你换一个不同型号的 STM32 时,也不用重写底层代码。HAL 库提供的 回调函数(Callback),本质上和做填空题一样,你不需要关心硬件底层实现(比如清理中断标志位,处理一些基础的状态),你只需要关心中断发生之后,空位里你想填什么就行(比如说空闲中断,半满中断,全满中断等)。
举个栗子:假设你在用串口接收中断。在 51 上,你可能直接在中断函数里读 SBUF 寄存器,然后处理数据。但 HAL 库的套路是:
- 硬件触发中断 → 2. 自动跳转到 HAL 库写好的 中断服务函数(比如
HAL_UART_IRQHandler)→ 3. 这个库函数帮你检查是哪种中断(接收完成?发送完成?错误?)→ 4. 最后调用你提前写好的 回调函数(比如HAL_UART_RxCpltCallback)让你处理具体业务逻辑。
那为什么要绕这一圈?
基础文件的配置
HAL 库的基础文件配置
HAL 库的串口配置
重新定向printf函数&scanf函数步骤
打开或创建工程
打开或者创建自己要用到的工程,配置串口相关的GPIO、时钟、波特率等,本次使用STM32CubeMX创建工程,打开串口1,配置波特率为115200,数据位为8,停止位为1,无奇偶校验。
记得添加MicroLib(其实不一定)
在KEIL勾选USE MicroLib
方法1——比较稳
//在main.h中添加串口结构体的定义
typedef struct // 声明一个结构体,方便管理变量
{
uint16_t ReceiveNum; // 接收字节数; 在中断回调函数里被自动赋值; 只要字节数>0,即为接受到新一帧的数据
uint8_t ReceiveData[512]; // 接收到的数据
uint8_t BuffTemp[512]; // 接收缓存; 注意:这个数组,只是一个缓存,用于DMA逐个字节接收,当接收完一帧后,数据在回调函数中,会自动转存到 ReceivedData[ ] 存放。即:双缓冲,有效减少单缓冲的接收过程新数据覆盖旧数据
} xUATR_TypeDef;
// 声明串口的结构体; 为了方便使用,一次过全声明了
extern xUATR_TypeDef xUART1 ; // 定义串口1的数据接收结构体,方便管理变量。也可以不用结构体,用单独的变量
extern xUATR_TypeDef xUART2 ; // 定义串口2的数据接收结构体,方便管理变量。也可以不用结构体,用单独的变量
extern xUATR_TypeDef xUART3 ; // 定义串口3的数据接收结构体,方便管理变量。也可以不用结构体,用单独的变量
extern xUATR_TypeDef xUART4 ; // 定义串口4的数据接收结构体,方便管理变量。也可以不用结构体,用单独的变量
extern xUATR_TypeDef xUART5 ; // 定义串口5的数据接收结构体,方便管理变量。也可以不用结构体,用单独的变量
extern xUATR_TypeDef xUART6 ; // 定义串口6的数据接收结构体,方便管理变量。也可以不用结构体,用单独的变量
然后在uart.c中添加头文件
#include "stdio.h"
#include <stdlib.h>
#include <stdarg.h>
在main函数中的使用方法就是
HAL_UARTEx_ReceiveToIdle_DMA(&huart1, xUART1.BuffTemp, sizeof(xUART1.BuffTemp)); // 开启DMA+空闲中断接收; 配合回调函数使用
因为这个结构体中的ReceiveNum会在收到数据后发生变化,所以可以通过if (xUART1.ReceiveNum)来判断是否接收到数据,通过xUART1.ReceiveNum = 0;来清0接收标记
然后需要添加下面的代码来实现printf的重定向
/******************************************************************************
* 功 能: printf函数支持代码
* 说 明: 加入以下代码, 使用printf函数时, 不再需要选择use MicroLIB
* 复制本函数到你的工程,即可使用
* 参 数:
* 返回值:
* 备 注: 最后修改_2020年07月15日
******************************************************************************/
#include <stdio.h>
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
}; // 标准库需要的支持函数
FILE __stdout; // FILE 在stdio.h文件
void _sys_exit(int x)
{
x = x; // 定义_sys_exit()以避免使用半主机模式
}
int fputc(int ch, FILE *f) // 重写fputc函数,使printf的输出由UART1实现, 这里使用USART1
{
// 注意,不能使用HAL_UART_Transmit_IT(), 机制上会冲突; 因为调用中断发送函数后,如果上次发送还在进行,就会直接返回!它不会继续等待,也不会数据填入队列排队发送
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0x02); // 使用HAL_UART_Transmit,相等于USART1->DR = ch, 函数内部加了简单的超时判断(ms),防止卡死
return ch;
}
最后添加在main.c文件中的回调函数,这边有个DMA的缓冲区
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
if (huart == &huart1) // 判断串口
{
__HAL_UNLOCK(huart);// 解锁串口状态
xUART1.ReceiveNum = Size; // 接收完成标志
memset(xUART1.ReceiveData, 0, sizeof(xUART1.ReceiveData)); // 清0前一帧的接收数据
memcpy(xUART1.ReceiveData, xUART1.BuffTemp, Size); // 把新数据,从临时缓存中,复制到xUART1.ReceivedData[], 以备使用
HAL_UARTEx_ReceiveToIdle_DMA(&huart1, xUART1.BuffTemp, sizeof(xUART1.BuffTemp)); // 再次开启DMA空闲中断; 每当接收完指定长度,或者产生空闲中断时,就会来到这个先存到bufftemp
}
}
方法2——多个重定向串口,只有发送
首先复制到usart.c里面,十分的快捷
void Uart_printf(UART_HandleTypeDef *huart,char *format, ...)
{
char buf[512]; //定义临时数组,根据实际发送大小微调
va_list args;
va_start(args, format);
uint16_t len = vsnprintf((char *)buf, sizeof(buf), (char *)format, args);
va_end(args);
HAL_UART_Transmit(huart,(uint8_t *)buf,len,1000);
}
然后在usart.h中添加
#include "stdio.h"
#include <stdlib.h>
#include <stdarg.h>
void Uart_printf(UART_HandleTypeDef *huart,char *format, ...);
然后使用这个的方法就是
Uart_printf(&huart1,"LED已经翻转",11);
直接定向+microlib
#include <stdio.h>
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
参考文章——【STM32hal库】串口重定向、接收不定长数据、命令解析、格式化发送的实现方法_stm32串口重定向hal库-CSDN博客
包含如何接受比较数据。
陶晶驰串口屏
陶晶驰串口屏是电赛上用到的最多的实现交互的器件极其方便
在串口重定向后,可以直接使用printf发送字符串,当要与陶晶驰串口屏通信时,须在字符串后加上\xff\xff\xff作为后缀
例如
printf("page0.t2.txt=\"%.3f\"\xff\xff\xff",frequency);
意为使串口屏的page0页面的t2文本控件显示frequency的数值[此处是将浮点数类型转换为文本]
这边给出一个没有验证的一个逻辑上适配串口方式1的逻辑代码
/**
* @brief UART DMA+空闲中断接收完成回调函数(HAL库扩展回调)
* @note 当USART1通过DMA接收数据时,若产生空闲中断或接收满指定长度,会进入此函数
* 用于处理陶晶驰串口屏发送的一帧完整数据,解析结束标志并更新对应参数
* @param huart: UART句柄指针(区分不同UART外设)
* @param Size: 本次接收到的有效数据长度(字节数)
* @retval None
*/
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
// 判断当前中断是否来自USART1(与陶晶驰串口屏通信的串口)
if (huart == &huart1)
{
__HAL_UNLOCK(huart); // 解锁UART状态(避免DMA接收状态锁定)
// 1. 将DMA临时缓冲区的数据复制到接收数据缓冲区(双缓冲机制,防止新数据覆盖)
xUART1.ReceiveNum = Size; // 记录本次接收的有效字节数
memset(xUART1.ReceiveData, 0, sizeof(xUART1.ReceiveData)); // 清空历史接收数据
memcpy(xUART1.ReceiveData, xUART1.BuffTemp, Size); // 从临时缓存复制新数据到接收缓冲区
// 2. 解析接收缓冲区中的数据,匹配陶晶驰串口屏的结束标志(0xf0/0xf1/0xf2)
// 结束标志应为一帧数据的最后一个字节(根据通信协议约定)
if (Size == 0) // 异常情况:接收长度为0,直接重启接收
{
HAL_UARTEx_ReceiveToIdle_DMA(&huart1, xUART1.BuffTemp, sizeof(xUART1.BuffTemp));
return;
}
// 获取一帧数据的最后一个字节(判断结束标志)
uint8_t endFlag = xUART1.ReceiveData[Size - 1];
float32_t frequency = 0.0f; // 临时存储解析出的频率值
// 根据结束标志解析对应参数
switch(endFlag)
{
case 0xf0: // 结束标志0xf0:表示接收的是"起始频率"参数
// 将结束标志前的有效数据(字符串)转换为浮点数
// 有效数据范围:xUART1.ReceiveData[0] 到 xUART1.ReceiveData[Size-2]
xUART1.ReceiveData[Size - 1] = '\0'; // 用字符串结束符替换结束标志,便于atof解析
frequency = atof((char*)xUART1.ReceiveData);
Freq_start = frequency; // 更新起始频率全局变量
// 向陶晶驰串口屏反馈:更新页面0的t0控件文本
printf("page0.t0.txt=\"%.3f\"\xff\xff\xff", frequency);
break;
case 0xf1: // 结束标志0xf1:表示接收的是"频率步长"参数
xUART1.ReceiveData[Size - 1] = '\0';
frequency = atof((char*)xUART1.ReceiveData);
Freq_rate = frequency; // 更新频率步长全局变量
// 反馈:更新页面0的t1控件文本
printf("page0.t1.txt=\"%.3f\"\xff\xff\xff", frequency);
break;
case 0xf2: // 结束标志0xf2:表示接收的是"终止频率"参数
xUART1.ReceiveData[Size - 1] = '\0';
frequency = atof((char*)xUART1.ReceiveData);
Freq_stop = frequency; // 更新终止频率全局变量
// 校验频率范围合法性:若终止频率 < 起始频率,复位为默认值
if(Freq_stop < Freq_start)
{
Freq_start = 5000; // 默认起始频率
Freq_rate = 100; // 默认步长
Freq_stop = 20000; // 默认终止频率
}
// 反馈:更新页面0的t2控件文本
printf("page0.t2.txt=\"%.3f\"\xff\xff\xff", frequency);
break;
default: // 未知标志:不处理,仅重启接收
break;
}
// 3. 重启DMA+空闲中断接收(确保持续接收后续数据)
// 缓冲区大小为结构体中BuffTemp的长度(512字节)
HAL_UARTEx_ReceiveToIdle_DMA(&huart1, xUART1.BuffTemp, sizeof(xUART1.BuffTemp));
}
}
HAL库配置IIC(0.96寸)
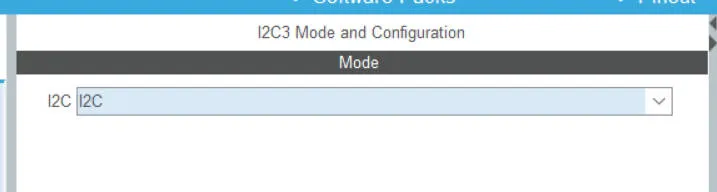
这边选择好后,修改一下参数

最后再把GPIO进行宏定义,然后导入两个oled的支持包就可以成功完成配置了
工程连接——基于STM32的OLED屏驱动程序,支持软件或硬件I2C(HAL库): 基于STM32 HAL库的0.96寸OLED(SSD1306)屏驱动程序,支持软件/硬件IIC
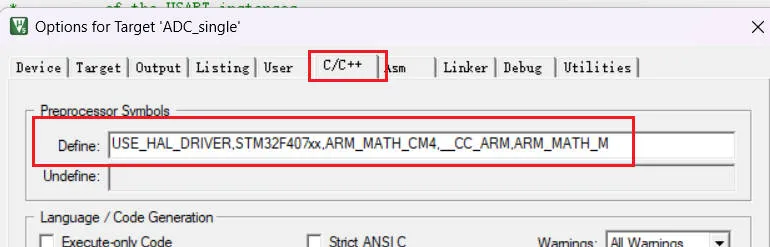
安装 DSP 库,以及宏定义
需要添加的宏定义
ARM_MATH_CM4,__CC_ARM,ARM_MATH_M//f407用的就是ARM_MATH_CM4
导入DSP库教程
我的DSP库没有选择,直接让CubeMX生成,而是选择后期通过,在keil中单独添加


通过这样就可以把DSP库添加进去了
然后引用一下要用到的FFT的头文件
#include "arm_math.h"
#include "arm_const_structs.h"
不报错就基本上成功了,下面给出测试示例教程——stm32-HAL库-fft-测频率幅度_stm32 fft-CSDN博客
定时器
什么是定时器?
定时器 顾名思义就是一个定时的器件。给定定时器一个初值,当定时器达到给定的初值时,会通知CPU或者其他处理器去做他们该做的事。可以理解为我们日常的闹钟,设置一个时间,该事件到达后,闹钟会提醒我们去做该做的事。
定时器 可以认为是一个计数器;给定计数器一个初值,每当计数一次,就会走过一个固定的时间(等同于我们的钟表,固定的进行扫描),当达到我们给定的初值时,该定时器就完成了自己的使命,产生定时器中断,执行中断函数中的程序命令(等同于闹钟响了,提醒我们该做更重要的事是一个意思)。
f4定时器
参考文章链接——STM32F4_定时器精讲(TIM)_stm32f4定时器-CSDN博客
STM32F4 板载了高级控制定时器(TIM1和TIM8)、通用定时器(TIM2到TIM5)、通用定时器(TIM9到TIM14)以及基本定时器(TIM6和TIM7)等,总共达14个定时器之多。

从时钟树中我们可以得知 (1)高级定时器timer1, timer8以及通用定时器timer9, timer10, timer11的时钟来源是APB2总线 (2)通用定时器timer2-timer5,通用定时器timer12-timer14以及基本定时器timer6,timer7的时钟来源是APB1总线


对应的时钟设置的图像为

测周法和计数法
使用定时器来测量频率
使用FFT来测量多个频率
什么是FFT
FFT即快速傅立叶变换,可以将一个时域信号变换到频域。因为有些信号在时域上是很难看出什么特征的,但是如果将其变换到频域之后,就很容易看出特征了,这也就是很多信号分析都会采用FFT变换的原因。其次,FFT可以将一个信号的频谱和相位提取出来,这在频谱和相位分析中也是经常用到的。 在实际工程中,一般的处理过程是先对一个信号在时域进行采样,如ADC采样,按照一定大小采样频率F去采集信号,采集N个点,那么通过对这N个点进行FFT运算,就可以得到这个信号的频谱和相位特征。
杂项
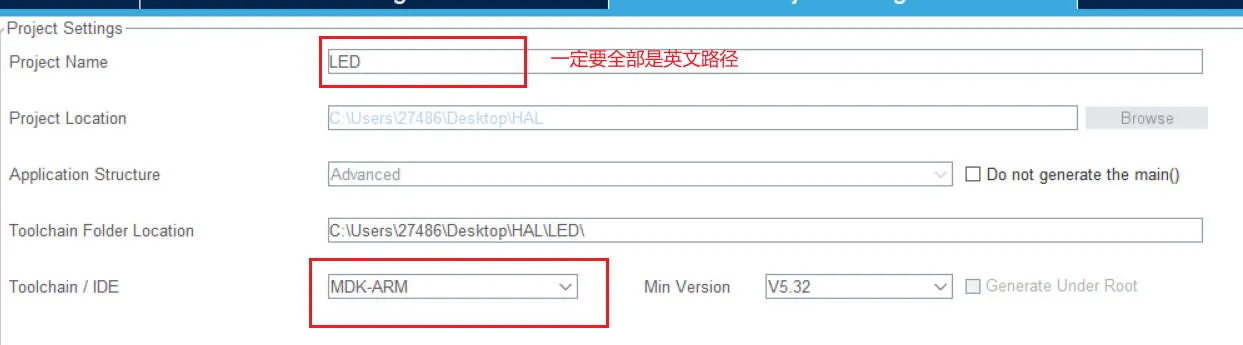
cubeMX生成代码配置
时钟树配置
文件生成导出
这边勾选上单独生成.c .h文件

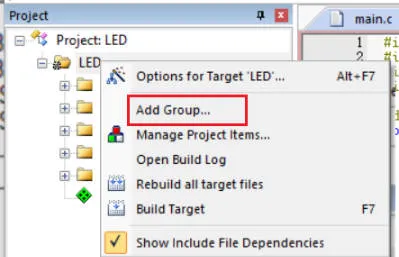
keil5 如何添加.h 和.c 文件
在 hal 库的编程中一般会生成如下的几个文件夹,在这几个文件夹内存储着各种外设所需要的函数接口 .h 文件,和实现函数具体功能的 .c 文件,但是为了更方便的开发,我们有时候需要添加 DSP库,也就是自己的 .c 和 .h 文件
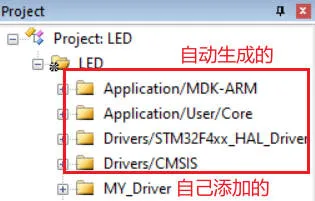
其实这个文件的地址并没有什么关系,只要后面把文件夹添加到链接路径即可,后续就是把这个文件夹的内容添加到 keil 当中了,具体的操作过程就跟下面的图像差不多。

添加文件后,就是要把编译路径包含进去,寻找路径点击 魔术棒,然后 C/C++, 在 include path 中添加即可



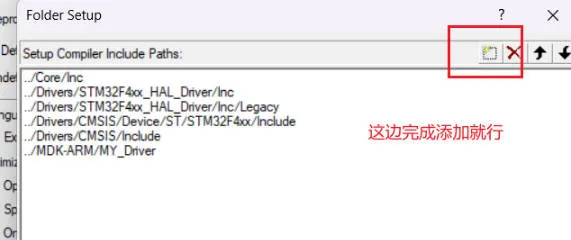
这样子就可以开始编写自己的头文件了。
文件的基础格式设置
头文件负责 “声明”(函数声明、宏定义、类型定义、外部变量声明等),源文件负责 “实现”(函数定义、变量定义等)
.h文件
一般的头文件的定义规范
大多数的.h文件都是这样定义的,这样定义的原因是防止重复定义,因为一个头文件会在很多的文件中被引用。
#ifndef _KEY__H_ // 检查 _KEY__H_ 这个宏是否未定义
#define _KEY__H_ // 如果未定义,就定义这个宏
#include "main.h"
void KEY_Scan(void);
#endif // 结束条件判断
第一次包含 key.h 时,_KEY__H_ 尚未定义,因此会执行 #define _KEY__H_ 并包含头文件内的内容(#include "main.h" 和函数声明)。后续再次包含 key.h 时,#ifndef _KEY__H_ 会发现 _KEY__H_ 已被定义,于是直接跳过中间的内容,直到 #endif
这样就确保了头文件的内容只会被编译一次,避免重复定义错误。
其中包含main.h的原因
main.h通常会包含项目中**全局通用的类型定义、宏定义或常量**,例如:
- 基础数据类型(如
uint8_t、int32_t等,通过#include "stdint.h"引入); - 项目级别的宏(如错误码
#define ERROR 0、成功标识#define SUCCESS 1); - 硬件相关的全局配置(如系统时钟频率
SYSCLK_FREQ、外设使能标志等)。
HAL 层(硬件抽象层)的代码(如stm32f4xx_hal_uart.h、key.h等)需要使用这些通用定义来保证类型匹配或逻辑一致性,因此会通过包含main.h间接获取这些全局信息。
.c文件
一般的源文件的定义规范
一般会把所有用到的.h文件都放在.h文件当中,然后外设只使用当前文件的.h,在文件中也主要是一些逻辑代码
#include "key.h" // 只需包含自身头文件,间接获取所有依赖
// 实现头文件中声明的KEY_Scan函数
void KEY_Scan()
{
if(KEY1 == GPIO_PIN_SET)
{
while (KEY1 == GPIO_PIN_SET); // 等待按键释放(消抖简化)
HAL_GPIO_TogglePin(LED_Blue_GPIO_Port, LED_Blue_Pin);
HAL_Delay(30); // 简单消抖
Uart_printf(&huart1, "LED已经翻转", 11);
}
}
外部变量
外部变量(如huart1):在定义它的.c 文件(usart.c)中定义,在对应的.h 文件(usart.h)中用extern声明,其他文件通过包含该.h 文件间接使用。
8种GPIO模式
输入模式(Input Modes)
| 模式名称(英文) | 核心特点 | 典型应用场景 |
|---|---|---|
| 浮空输入(Floating Input) | 引脚为高阻抗状态,电平完全由外部电路决定,无内部上拉 / 下拉电阻,易受干扰。 | 接收外部明确驱动的信号(如 USART_RX、红外接收、外部传感器主动输出信号)。 |
| 上拉输入(Pull-up Input) | 内置上拉电阻,无外部信号时默认高电平;外部信号可拉低电平。 | 按键检测(一端接 GND,按下时引脚被拉低)、外部低电平触发的状态检测。 |
| 下拉输入(Pull-down Input) | 内置下拉电阻,无外部信号时默认低电平;外部信号可拉高电平。 | 按键检测(一端接 VCC,按下时引脚被拉高)、外部高电平触发的状态检测。 |
| 模拟输入(Analog Input) | 引脚直通内部 ADC/DAC,无数字缓冲和上拉 / 下拉电阻,用于采集连续模拟信号。 | 与 ADC 配合测量传感器信号(如电压、温度)、音频输入等模拟量。 |
输出模式(Output Modes)
| 模式名称(英文) | 核心特点 | 典型应用场景 |
|---|---|---|
| 推挽输出(Push-Pull Output) | 可主动输出高 / 低电平,驱动能力较强,电平由 CPU 直接控制输出寄存器。 | 驱动 LED、继电器、外部逻辑电路(如舵机信号、普通控制信号)。 |
| 开漏输出(Open-Drain Output) | 仅能主动拉低电平,输出高电平需外部上拉电阻;支持 “线与” 逻辑。 | I2C 总线(SDA/SCL)、多设备共享总线、5V 电平兼容通信(通过外部上拉匹配电平)。 |
| 复用推挽输出(AF Push-Pull Output) | 具备推挽输出特性,但引脚功能由外设(如 USART、定时器)控制,非 CPU 直接驱动。 | USART_TX、SPI_MOSI、定时器 PWM 输出(外设控制信号输出)。 |
| 复用开漏输出(AF Open-Drain Output) | 具备开漏输出特性,引脚功能由外设控制,需外部上拉电阻。 | I2C 外设复用引脚、USART_RX(部分场景)、外设故障信号输出(共享总线场景)。 |